On June5, 2026, the 91st Zhi Xin Forum was held in Lecture Hall 117 of the Zhi Xin Building. Professor Timothy Gordon fromthe University of Lincoln, UK, was invited to deliver a talk entitled “Short-Horizon Predictive Steering Control within an Artificial-Flow-Guidance-Based Unified Co-Pilot Architecture”.
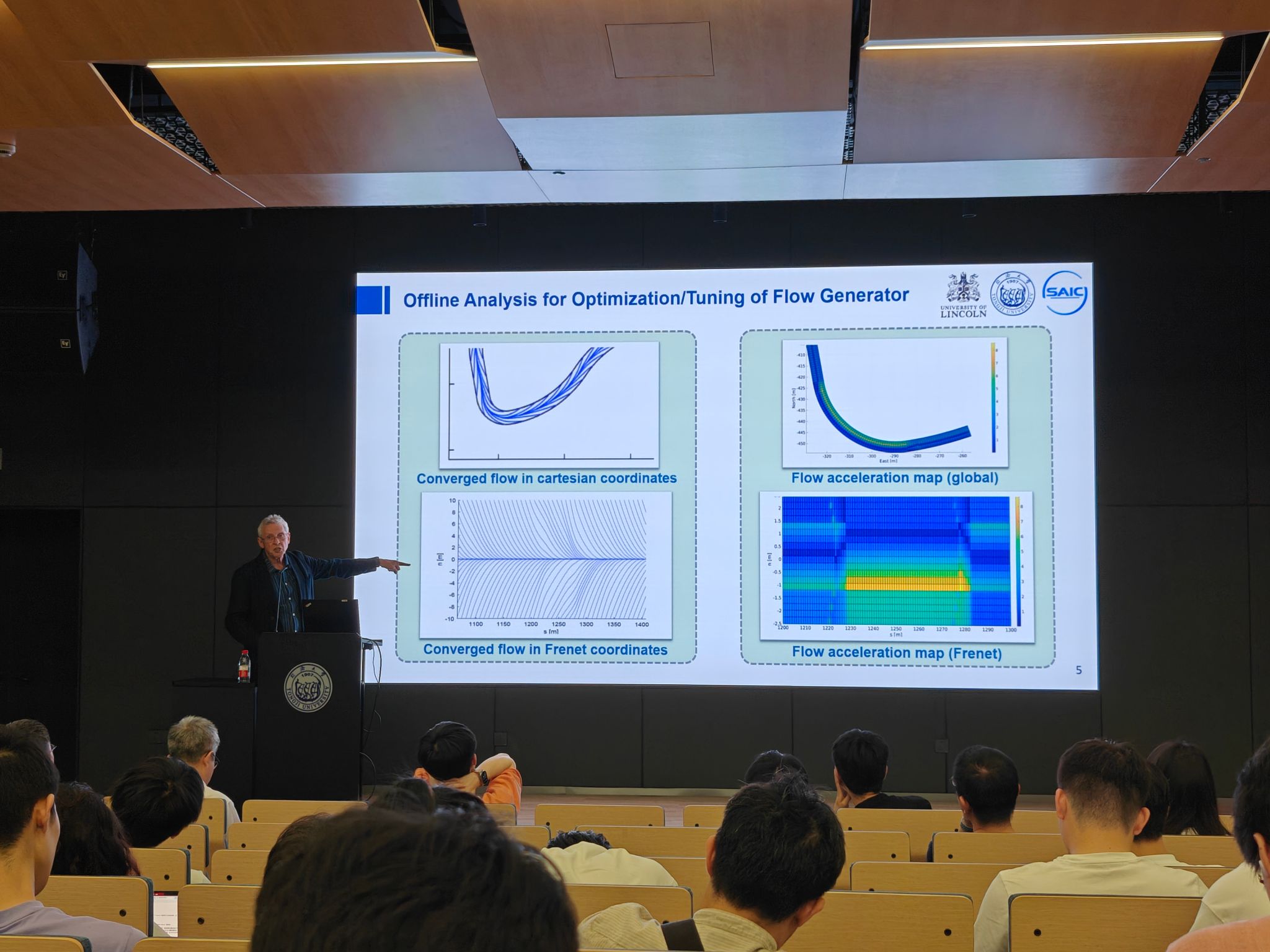
In this talk, Professor Gordon focused on frontier issues in vehicle dynamics control for autonomous driving. He first introduced a reference generation method for vehicle dynamics control based on Artificial Flow Guidance (AFG), and then systematically presented a modular, standardised and agile integrated control architecture for autonomous driving dynamics, with AFG as its core methodology. In response to the diverse and complex scenarios faced by autonomous driving systems, Professor Gordon proposed a design concept featuring the coordinated use of multiple models, multiple references and multiple algorithms, offering new perspectives for improving the adaptability, robustness and scalability of vehicle motion control systems. From an engineering practice perspective, thetalkdemonstrated the application of fundamental AFG algorithms under different typical driving conditions, and further introduced the AFG-MacAdam method incorporating short-horizon preview mechanisms, together with its validation results in real-vehicle tests.

After the talk, Professor Gordonengaged in a lively exchange and discussion with the attending faculty and students on topics such as the application of AI in vehicle dynamics control. Drawing on his own research experience, he encouraged students to actively broaden their horizons, explore diligently, and discover and solve new scientific problems. This talk significantly broadened the perspectives of our university’s faculty and students and deepened their understanding and knowledge of vehicle dynamics controlforautonomous driving.