On March 13, 2024, the 64thZhi·Xin forum was held in 117 Lecture hall at Zhixin building. This forum was jointly organized by the College of Electronic and Information Engineering, Tongji University and Shanghai Research Institute for Intelligent Autonomous Systems. Prof. Timothy Gordon from the University of Lincoln, UK, was invited to give a talk on "Post-Impact Stability Control-automated driving beyond the normal limits of vehicle control", which was moderated by Prof. Hong Chen.
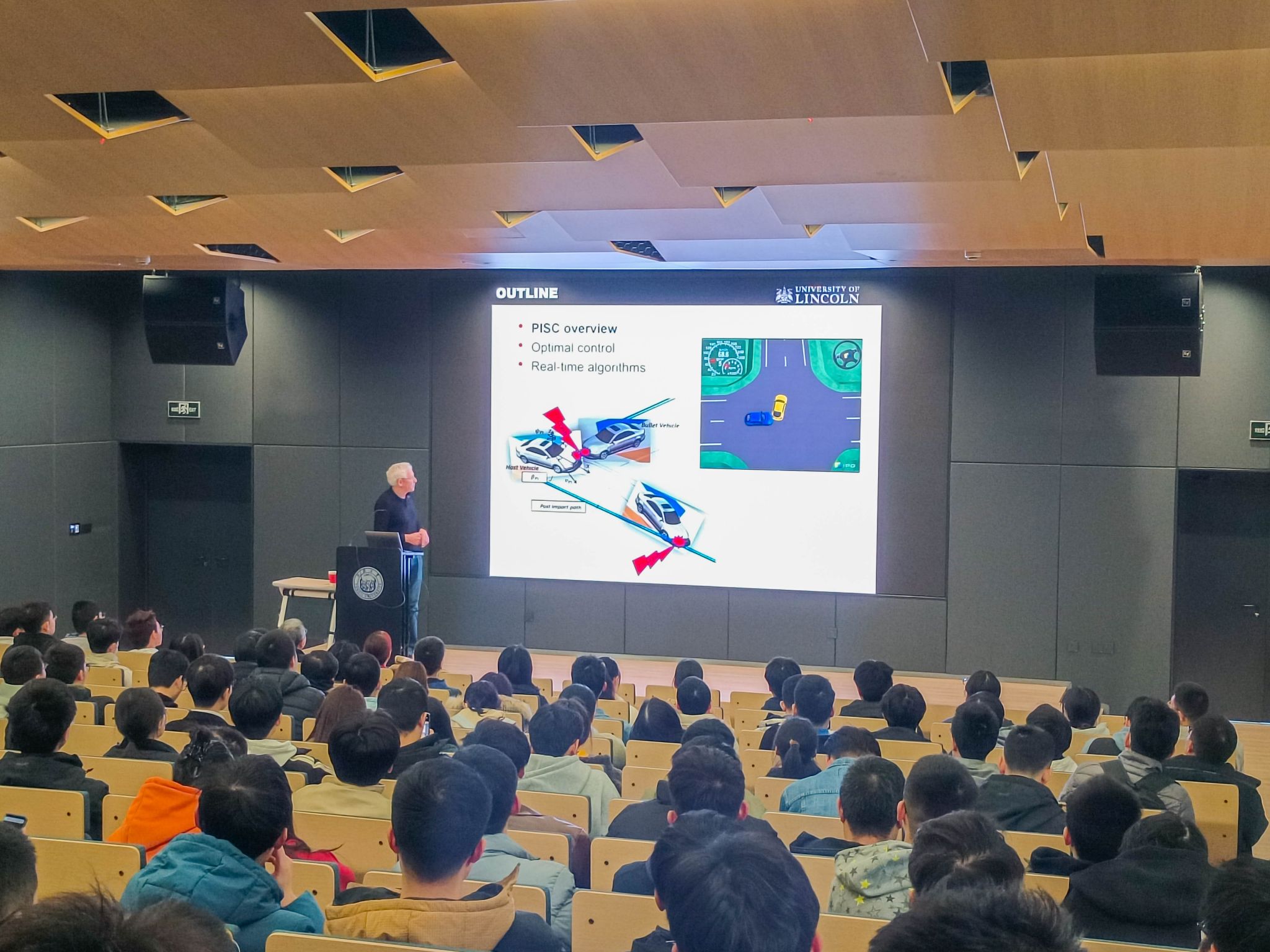
First, Prof. Timothy Gordon introduced the post-impact stability control (PISC), analyzed the hazards of vehicle accidents, real-world collision events and frontal collision cases in simulation software, and compared the stability control effects with and without the PISC function. Then, he presented the three stages of PISC in detail, including PISC automatic control, stabilized path control, and soft switching to autopilot. After that, Prof. Gordon modeled the post-impact stability control problem as an optimization problem and solved it using the Pontryagin minimum principle, which introduced the quasi-linear optimal control as a good approximation to the fully nonlinear optimal control. In addition, Prof. Timothy Gordon gave the structure of the post-impact stability control scheme and the four performance metrics of the optimization problem. Finally, Prof. Timothy Gordon tested the effectiveness of PISC and other different control schemes through simulations and experiments.
After the talk, Prof. Timothy Gordon exchanged views with teachers and students on issues related to the post-impact stability control and autonomous driving, and encouraged students to broaden their horizons and explore, discover, and solve new scientific problems based on his own experience. This talk further broadened the horizons of our teachers and students and enhanced their knowledge and understanding of post-impact stability control.
Written by Zhang Hao
Photographed by Ren Qian/Yin Zhangyun
